MEMS technology is inevitable for ultrasound devices such as BAW filters, pMUT and cMUT. In this short course, the lecturers, who have been deeply involved in developing both MEMS and ultrasound device technologies, present and discuss the following MEMS-related fabrication and design techniques for the ultrasonics community:
1. MEMS fabrication technology and process integration - Fundamental concepts learned from historical papers
2. Modern MEMS processes used for mass-production
3. Multi-frequency contour-mode resonator design and fabrication
4. GHz frequency ultrasonic resonant actuators
MEMS fabrication technology is based on semiconductor manufacturing technology, but there are varieties of MEMS-specials, which you should know for the process integration of MEMS. In the first half of this lecture, Prof. Tanaka will explain “beautiful” examples of MEMS process picked up from historical papers, and then modern MEMS processes used for mass-production. Through a plenty of examples, you will be taught what is MEMSwise thinking in the design and process integration. The goal of this part is to augment options of process technology applicable for your ultrasonic devices.
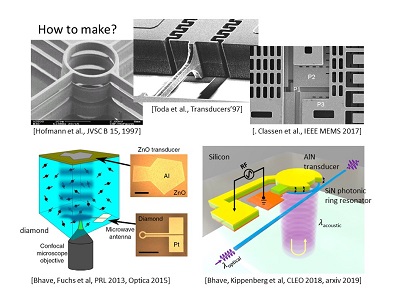
In the second half of this short course, Prof. Bhave will cover the design and fabrication of contour mode resonators, discuss their scaling to GHz frequencies and compare and contrast them to the mass-produced and industry-leading film bulk acoustic resonators (FBAR). In the last hour, we will segway into a brief discussion of high overtone bulk acoustic resonator (HBAR) design and introduce how these “old” resonators are finding new applications in communication, computing, photonic and quantum systems.
This short course is different from one in the last year, and worth taking also for who took the last years’ short course about MEMS technology.